Welcome to My Portfolio of Projects

Master Thesis: Online UAV Exploration for UGV Route Planning
The focus of my research is how to effectively explore an unknown region with a UAV planning for a ground vehicle. In the system, the UAV has a custom stereo system which generates a height map for planning. The ground vehicle has no sensors. Thus when the UGV needs to go somewhere in the unknown environment the UAV needs to find a safe path for a ground vehicle. My work is the online exploration for the UAV and maintaining the tempo of the operation by allowing the UGV to follow behind the UAV in an efficient manner.
View Project
University Rover Challenge
For my senior design project I worked on a team that designed and built a rover to enter in the 2018 University Rover Challenge held by The Mars Society. I served as the engineering lead and worked on a variety of subsystems as well as managing the technical aspects of the project. Our rover was one of 36 selected from a competitive pool of 95 teams to compete.
View Project
Precision Unmanned Navigation and Cargo Handling Competition
A colleague and I decided to form a team to enter the AIAA Precision Unmanned Navigation and Cargo Handling (PUNCH) competition. This competition was to simulate package delivery with a UAV. Small packages (under 5 lbs) were to be delivered with precision to specified targets. I led the team of five to construct the airframe. I designed the system architecture and the software.
View Project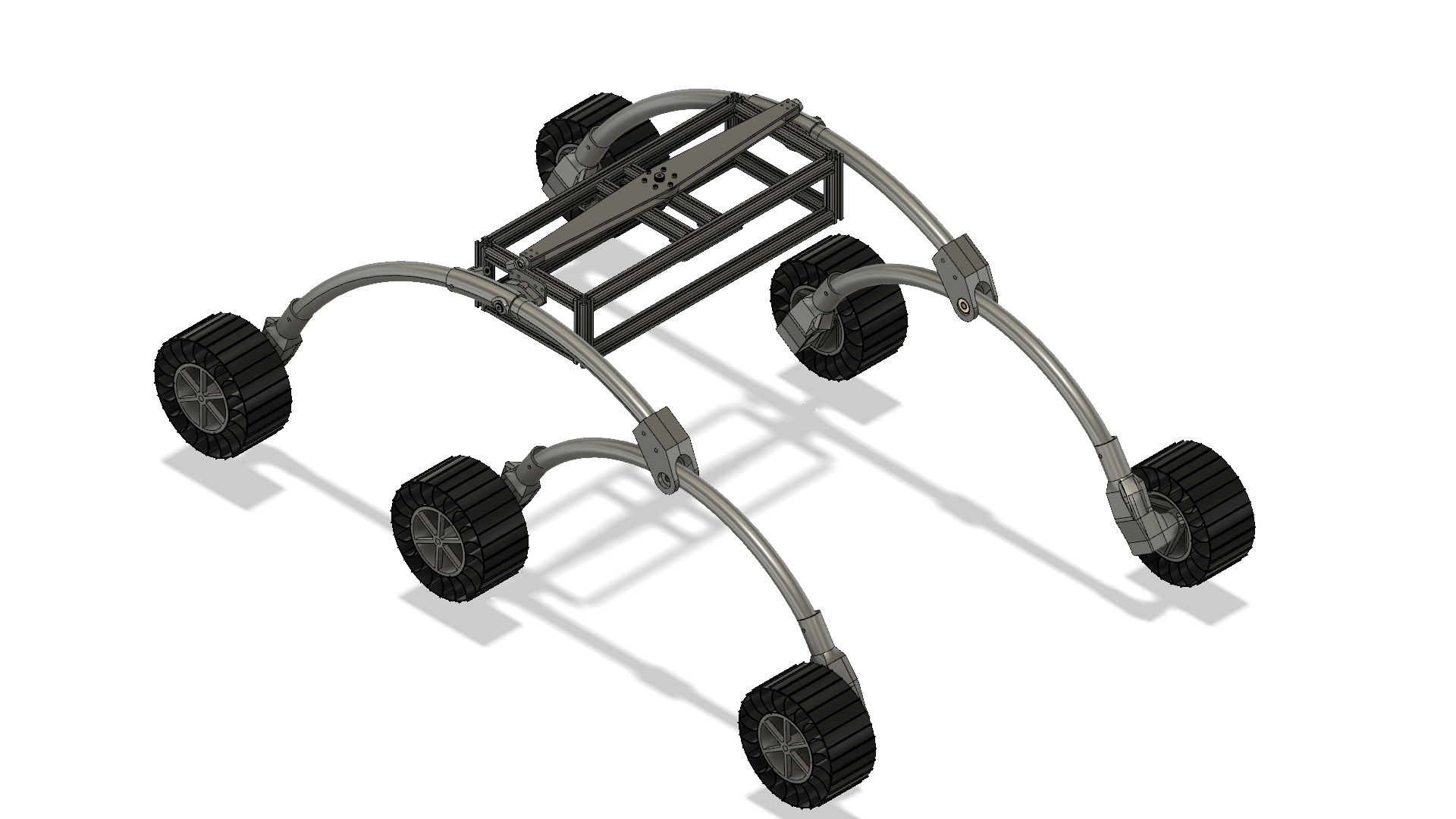
Outdoor Ground Vehicle Software Test Platform
After the University Rover Challenge I was left with a desire to play more with outdoor autonomous navigation, especially with a robot that has an ability to go over a certain size/type of obstacles. Without the teams rover or $17,000 of money to make my own I decided to develop a low cost platform to test software. The price point I was aiming for was about $500 but when it's all said and done it will probably be closer to $600-$700. This is designed to be a fully ROS capable robot when completed. It is currently in the manufacturing stage.
View Project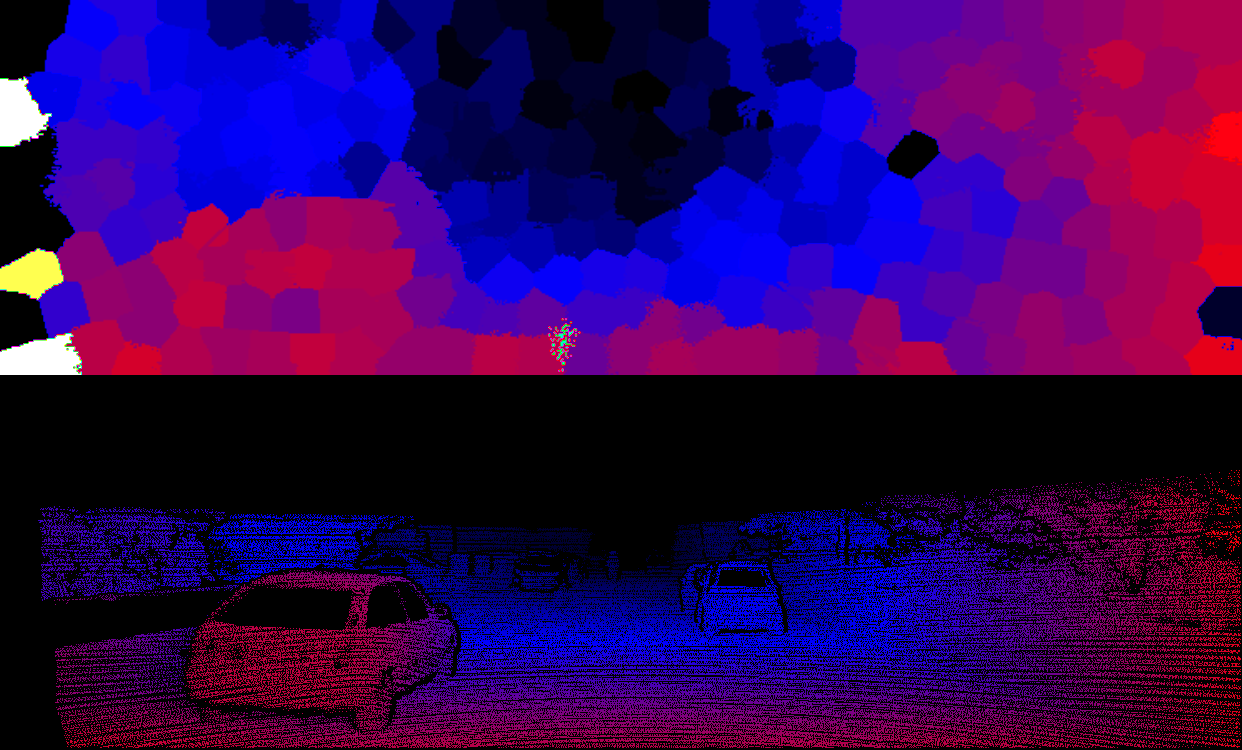
SuperPixel Stereo
For my computer vision class final project, I looked at using superpixels to speed up the stereo calculation for outdoor mapping of buildings and large objects. This was done for my final project. Using a normalized cross-correlation technique with SLIC superpixels I was able to get results ~6 times faster than a pixel-based approach. The algorithm was tested against the Middlebury and KTTI dataset.
View Project